From: The World In Your Head by Steven Lehar
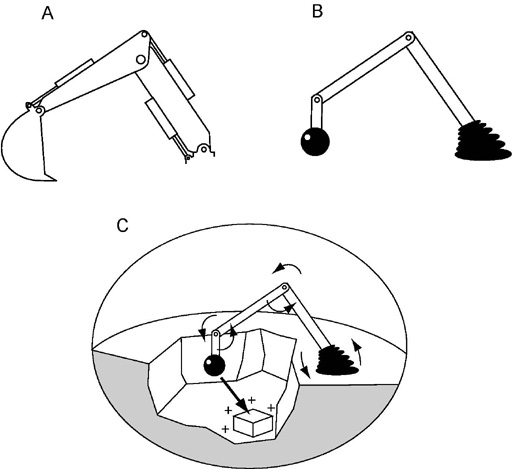
Fig. 10.2 The isomorphic backhoe solves the multijointed limb problem by duplicating the configuration of the arm (A) in the configuration of the control lever (B), which remains mechanically coupled to the configuration of the arm. Strain gauges installed at every joint in the lever command the corresponding joints of the backhoe. This allows the backhoe to be controlled simply by pushing on the end effector. (C) If the isomorphic backhoe control lever is installed in a spatial replica of the local environment, a command to move toward an object—for example, the box depicted with positive valence—can be expressed as a force of attraction between the object and the end effector, which in turn is automatically converted to the appropriate pattern of torques at each joint of the compound arm.