From: The World In Your Head by Steven Lehar
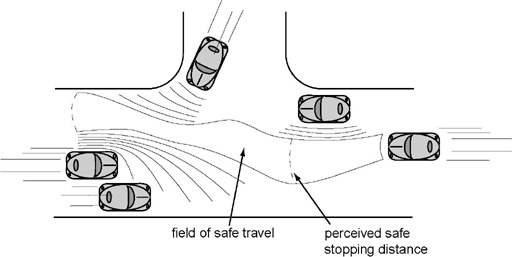
Fig. 10.7 (A) A field theory of driving, adapted from Gibson and Crooks (1938). Every obstacle presents a field of threat, and moving obstacles present a larger field of threat in the direction of motion. A driver steers his vehicle through a field of safe travel, which is perceived as a snakelike field of influence that winds its way between perceived obstacles.