Plato's Cave: Evidence from Visual Illusions
Visual Illusions
Consider the Kanizsa square, as shown in Figure 3 (A).
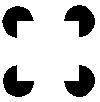
Figure 3(A)
In this figure an illusory square surface is seen to occlude four
black circles, which in turn appear to be amodally completed behind
the square. There is a revealing difference between the square percept
of Figure 3 (A) and that of Figure 3 (B)

Figure 3 (B)
which contains the same square information, and stimulates a similar
recognition of that square relationship, and yet Figure 3 (A) creates
in addition the percept of a solid square surface that appears to
hover in depth some distance above the page, with an actual brightness
edge seen between the white illusory square and the white page behind
it. The difference between these two figures exemplifies the role of
the spatial integration stage of visual processing, which goes beyond
the mere recognition of geometrical forms, to an actual "filling in"
of the recognized feature in both color and depth, creating a percept
that is virtually indistinguishable from, or at least expressed in the
same spatial language as a real brightness and depth edge. This is
what I have called reification, a materialization or reconstruction of
a higher level feature in the lower level representation at the
highest resolution available in the system. The fact that the very
solid and real looking surface in Figure 3 (A) is actually illusory is
direct evidence that the visual system is capable of constructing very
solid and real looking spatial representations which are nevertheless
illusory. In essence this is the same kind of perceptual processing as
is seen in the example of the tennis player, discussed above, where
the solid surface of the tennis court is interpolated into the blind
region outside the player's visual field, just as the illusory square
is interpolated through a region of missing information between the
inducing pac-man figures. The fact that the illusory square blends in
with the features of the "real world" around it suggests that the
illusory percept of the square and the "real" percept of the page
behind it are constructed of the same "perceptual stuff". In other
words the solid three-dimensional page that you hold in your hands is
in some sense just as illusory as the square in Figure 3 (A), except
that it is supported by more visual and somatosensory evidence,
creating a more vivid and compelling percept, just as the square in
Figure 3 (A) is more vivid and compelling than that in Figure 3 (B),
due to more supporting evidence.
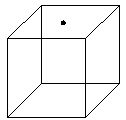
Figure 3 (C)
Figure 3 (C) shows another example of visual reification, where the
two-dimensional pattern of lines in a Necker cube do not simply
register cognitively as possibly representing a three-dimensional
structure, but actually pop into a full three-dimensional percept so
compellingly that it is almost impossible to perceive the original
flat pattern in the absence of the spatial
interpretation. Cognitively, the spatial interpretation of the Necker
cube is ambiguous, and can be seen in two equally valid alternative
ways. In the resulting spatial percept however, the perceptual system
pops from one to another in a bistable manner, because the perception
of one alternative excludes the other. This exemplifies the difference
between the higher level invariant abstraction of "a cube", and the
lower level variant reification of a particular cube at a particular
orientation and location. The invariant representation is important in
order to generalize a multitude of possible figures as the same
invariant cubical form, whereas the variant representation is
essential for physical interaction with this particular cube. Notice
how the spatial percept of the Necker cube does not just select
between the two alternative interpretations, or simply show which
lines are in front and which are behind, but in this representation,
every point on every line is assigned an exact three- dimensional
location at the highest possible resolution. Furthermore, every point
on every surface defined by those lines is also assigned an exact
three-dimensional location. Consider the small dot in Figure 3
(C). Although this dot carries no explicit information of depth, it is
most easily perceived as being located on one of the surfaces created
by the percept, i.e. the top surface of the cube, or a vertical side
surface, or perhaps on the surface of the paper behind the cube. In
each of these alternative interpretations the dot takes on a very
specific spatial location defined by the spatial surfaces in the
percept. The purpose of this spatial representation therefore appears
to be to locate visual features relative to one another in a fully
spatial context, in order to choose between alternative
interpretations of the visual input.
The selection between alternative interpretations is automatic and
preattentive, inaccessible to conscious analysis, suggesting a low
level phenomenon. Furthermore, the operation appears to occur in
parallel, because the speed of such perceptual selection does not
depend on the visual complexity of the scene, but occurs just as
quickly for simple stick figures as in Figure 3 (C) as it does for the
spatial interpretation of two-dimensional photographs, even of complex
scenes containing thousands of visual edges. The selection of a
particular interpretation, although apparently a low level process, is
nevertheless not a simple feedforward operation that is presented to
the higher cognitive stage as a fait accompli, but rather it is one
state of a multistable system, which can be pushed into another state
at any time on the basis of higher level cognitive influences. For
example it is possible to induce the percept of the dot in Figure 3
(C) to appear at either a nearer or farther surface of the figure by
simply willing it to be there, although the dot resists taking up
intermediate positions between those surfaces. This is fundamentally
different from the feed-forward algorithms often used for image
processing and pattern recognition. In such sequential algorithms
there is no opportunity to correct errors that occur early in the
processing stream in the local interpretation of visual features, with
the result that errors propagate forward producing absurd results in
the global interpretation. Instead, the perceptual system appears to
be a single complex system of forces in balance with one another, such
that alteration of any part of the representation either at a low or a
high level can potentially influence every other part of the system,
and in the case of a multi-stable percept such as the Necker cube, the
smallest influence is capable of making the system cascade into a
totally different state. For example the introduction of two tiny
breaks in two lines in the figure, as shown in Figure 3 (D),
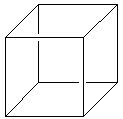
Figure 3 (D)
is sufficient to anchor the entire spatial percept permanently in one
of the two alternative states. This principle surely must extend to
the interaction between different perceptual modalities, such as
vision and hearing, as well as somatosensory and proprioceptive
perception, so that any perceptual ambiguity in any one modality will
be influenced by evidence from another modality, resulting in a
spatial interpretation that is maximally consistent with all
modalities simultaneously. This property of the perceptual system
would account for the subjective impression of a single unified
percept of the world.
More Illusions
(more to come...)
Return to argument
Return to Steve Lehar